The Queen’s Mostly Autonomous Sailboat Team (QMAST) is a student design team that designs and builds autonomous sailboats. The boat is entered in annual competitions that test navigation, tactics, and design. During the race, the boat must steer and trim sails based on measurements of the wind, position, and direction without human intervention. Due to this lack of intervention, several additional subsystems need to be implemented to ensure the correct performance and safety of the boat.
QMAST’s 4-metre sailboat, the GaelForce XL, required an update to its obstacle detection system. Students were asked to implement their abilities in research methods, coding, and construction to produce several different solutions to this open-ended problem. Based on the constraints of durability, accuracy, and ease of implementation, the team was able to assemble in-depth feasibility reports for the various detection systems and was also able to design and construct possible mounting techniques. Sections of computer script were also written to be integrated with the boat’s onboard computer.
Students were able to work closely with their client and their Project Manager to produce functional computer scripts and mounting assemblies. The client was presented with a complete research proposal and several mounting prototypes. QMAST is actively incorporating the provided research and code into their own scripts in order to further develop this system.
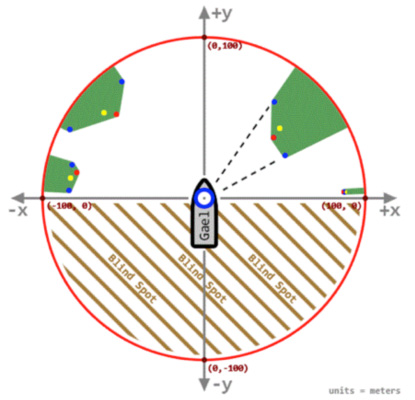
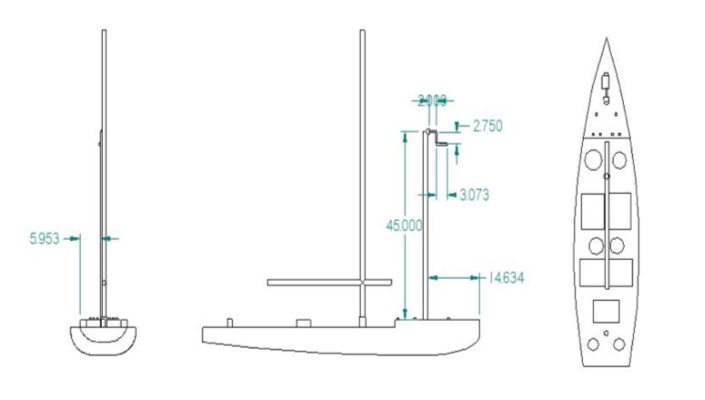
Range of detection system, indicating use of edge-detection technologiesSimple model of the GaelForce XL sailboat with bow mounts for the proposed detection system